On peut rajouter un argument à la déclaration du robot : le nombre de sonnettes, par exemple :
Robot 1 2 N 4
où les arguments sont :
ligne colonne direction initiale (N, W, S, or E) nombre de sonnettes.
Un robot peut transporter des sonnettes ("beepers" en anglais), qui sont des petits dispositifs sonores que Guido peut entendre. Guido peut les ramasser ou les déposer, selon vos ordres. Guido ne peut entendre une sonnette que si elle se trouve sur la même intersection que lui. Guido a un sac à sonnettes dans lequel il transporte les sonnettes qu'il ramasse. Il peut aussi sortir des sonnettes de ce sac pour les déposer à l'endroit où il se trouve. Vous spécifiez le nombre initial de sonnettes dans le fichier monde.
Les commandes permettant de manipuler les sonnettes font partie des commandes élémentaires du robot que vous rencontrerez. En voici une liste complête :
pickbeeper : ramasse une sonnette putbeeper : pose une sonnette (s'il y en a dans le sac !)
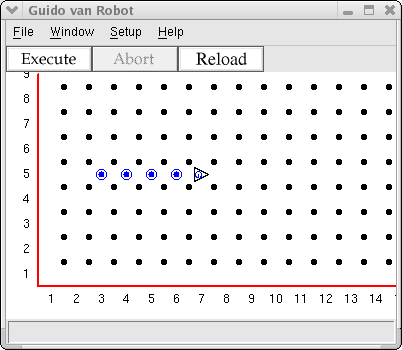
Placez un robot avec quatre sonnettes à l'intersection de la 1ère avenue et de la 5ème rue, faisant face vers l'est. Il doit se déplacer de deux blocs vers l'est, déposer une sonnette, puis continuer à se déplacer vers l'est en déposant à chaque intersection une sonnette jusqu'à ce qu'il n'aie plus de sonnettes. Il devrait alors se déplacer encore une fois vers l'est, puis se mettre à l'arrêt. Quand il aura fini son périple, l'affichage devrait ressembler à ceci :
Copyright © 2003 Roger Frank.